Our new product
the iLifebuoy is an autonomous self-propelled lifebuoy which streamlines the end-to-end MOB rescue process. It is a collaborative robot (cobot) which works with the rescue team / lifeguards in order to reach and help the MOB in the quickest possible manner. iLifebuoy minimises the need for manual human intervention (ease of use) to initiate and perform the different steps of the rescue operation – detect, alert, mobilise, reach and provide support. It is an autonomous tracer that uses three different types of sensors to localise the MOB – video, audio and sonar. During the User Needs Assessments we performed, we uncovered an unexpected phenomenon that has received considerable coverage in the media – tragedy/incident witnesses using their phones to take a video of the situation as it is happening and uploading to social networks. This phenomenon enables the technical feasibility of rapidly establishing the initial location of a person in water without any additional sensors on the ship/boat/vessel. The need for such sensors has so far hindered the development of a robotized lifeguard. Way of working: First, once initiated (i.e. deployed or thrown in water) the iLifebuoy connects to the four closest cameras of smartphones via onboard wifi and direct network connection. Then, it collects live video from smartphone’s cameras of eyewitnesses nearby; video processing software and a machine-learning algorithm use the simultaneous video feeds to establish the location of the MOB in the water. Second, the Acoustic system identifies any sounds that resemble human calls for help in many languages. An additional module called “Voice Activity Detection” with noise-reduction technology for noisy environment recognises the human voice and establishes the approximate location of the MOB. Third- sonar (hydro-acoustic system). It looks for the sonar profile of the underwater motion of a person in trouble – kicks, unsystematic splashes, and body movements. The iLifebuoy uses the approximate direction and location provided by the audio and video systems to establish the initial position of the MOB and engage the propeller almost immediately. Then, the sonar signals help determine the accurate position of the MOB and guide the iLifebuoy. Each iLifebuoy unit is self-contained unit encompassing a water jet propulsion device, sonar, VAD (voice activity detection) device, and a CPU to process the incoming audio, visual and sonar data; determine the MOB location in the water with accuracy within 1 meter; and adjust course and initiate the propulsion. It is powered via a water-activated battery (i.e. triggered upon contact with water) able to provide 5 minutes of propulsion at full speed (5m/s). Depending on the size of the vessel, a number of iLifebuoys will be mounted on each side of the hull via a mechanised brace that can be released either manually or automatically
As already highlighted, the lifesaving category has seen no historical evolution since the invention of the ‘traditional’ lifebuoy in ~1800! Only in the past few years, some companies (there are only 2!) have attempted to use technology to improve the effectiveness of this legacy lifesaving equipment – remote controlled “U SAFE” and “E.M.I.L.Y”. Nevertheless, as you can see below, the competitive evaluation matrix clearly highlights iLifebuoy’s significant superiority over existing competing solutions.
Generally, there are two types of potential competitors: passive/traditional lifebuoys and ‘recent’ remote controlled ones (RC). iLifebuoy is not remotely controlled (it autonomously reaches the MOB) and does not require a human operator making it significantly more effective and efficient in reaching and providing support to the MOB. iLifebuoy is the most cost effective solution out of the non-traditional available lifebuoys; it is exceptionally easy to use by anyone and requires no training, skill or physical strength. In contrast, only a specially trained person can operate the remote controlled „drones“ U-Safe and EMILY. Due to the complexity of their operation, RC lifebuoys take a considerable amount of time to reach the MOB, which could be even more difficult in harsh weather conditions when the operator does not have a line of sight! Furthermore, the Traditional one not only necessitates to be thrown closely to the MOB but it normally requires a lifeguard to enter the water thus endangering another life! iLifebuoy’s 3 sensors allow it to successfully reach and support the MOB even if there is no direct line of sight. Finally, iLifebuoy uses a ‘dry’ (water-activated) battery which can last significantly longer than other types of batter thus extending the replacement/recharge cycle (to 5 years vs 1 year for RC lifebuoys) and minimising the maintenance required (massive benefit for companies that need to maintain hundreds of ships!).
Standard lifebuoys assume and require the MOB to be able to swim in harsh weather and water conditions to reach the lifebuoy, thus placing people with lower physical strength at a disadvantage and higher risk of drowning. iLifebuoy automatically reaches the MOB thus eliminating this requirement and ensuring a fair and equal chance of saving for people across different ages, genders and physical abilities.
As part of our research, we have also identified other patented (but not commercially available) remote-controlled lifebuoys – CN201124925Y; CN202828044U; CN203064186U; US 8882555 B2; CN205440813U. However, their ‘remote-controlled’ nature predisposes them to the same disadvantages of already available RC lifebuoys discussed above. Additional advantages of iLifebuoy over competition are: iLifebuoy is a cobot – it works largely autonomously using its 3 sensors, but it needs to be put into the water by humans and also receives (video) input from a human. Such collaboration has proven to lead to better results than a single operation carried out only by humans or only by robots (Interactive robotics,MIT, 2017). The onboard adaptive navigation system of iLifebuoy work under ROS (robot operating system) and is equipped with visual vSLAM. Overall, iLifebuoy is significantly different from any alternative and provides life-saving advantages not available by any competitor.
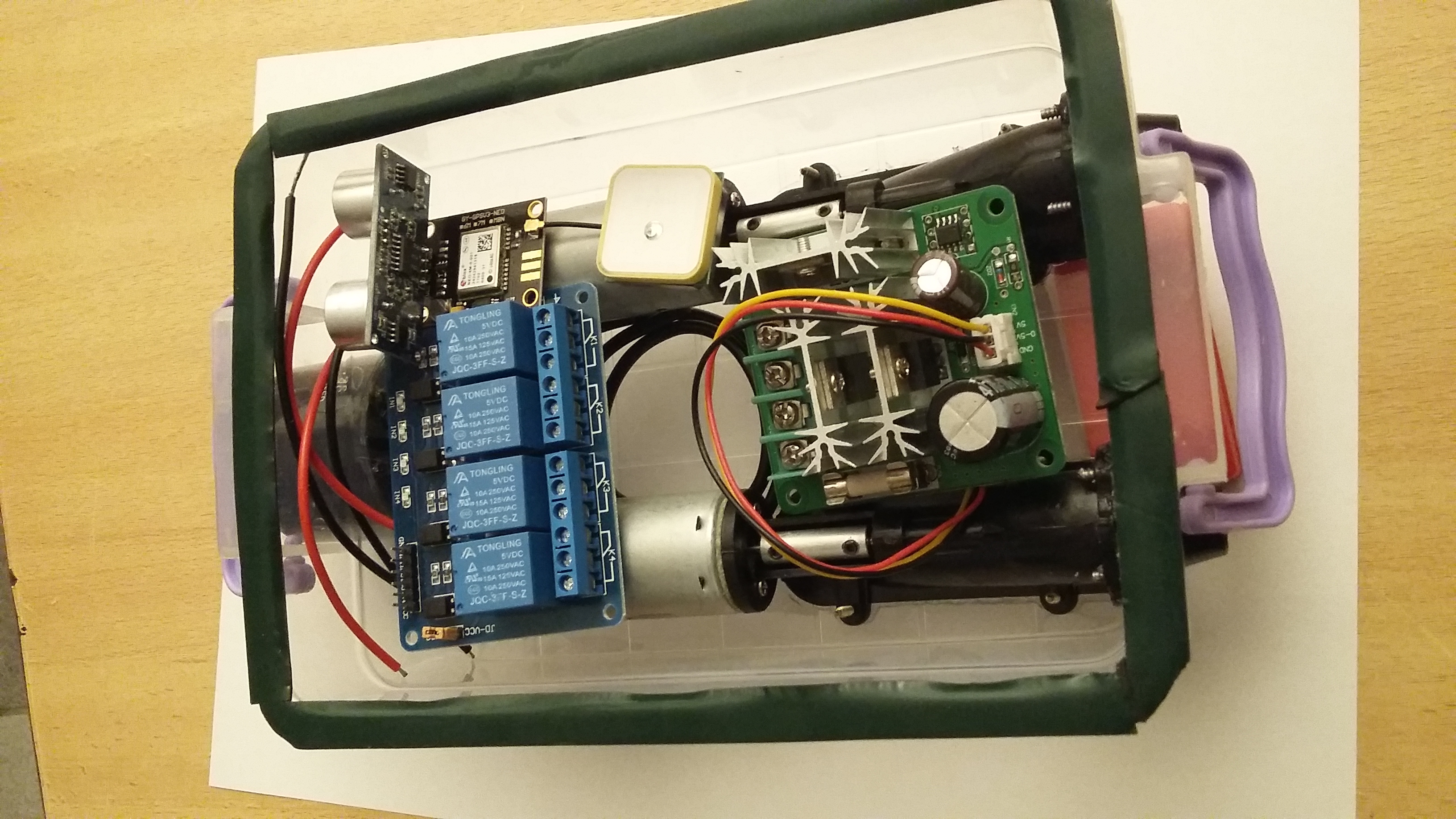
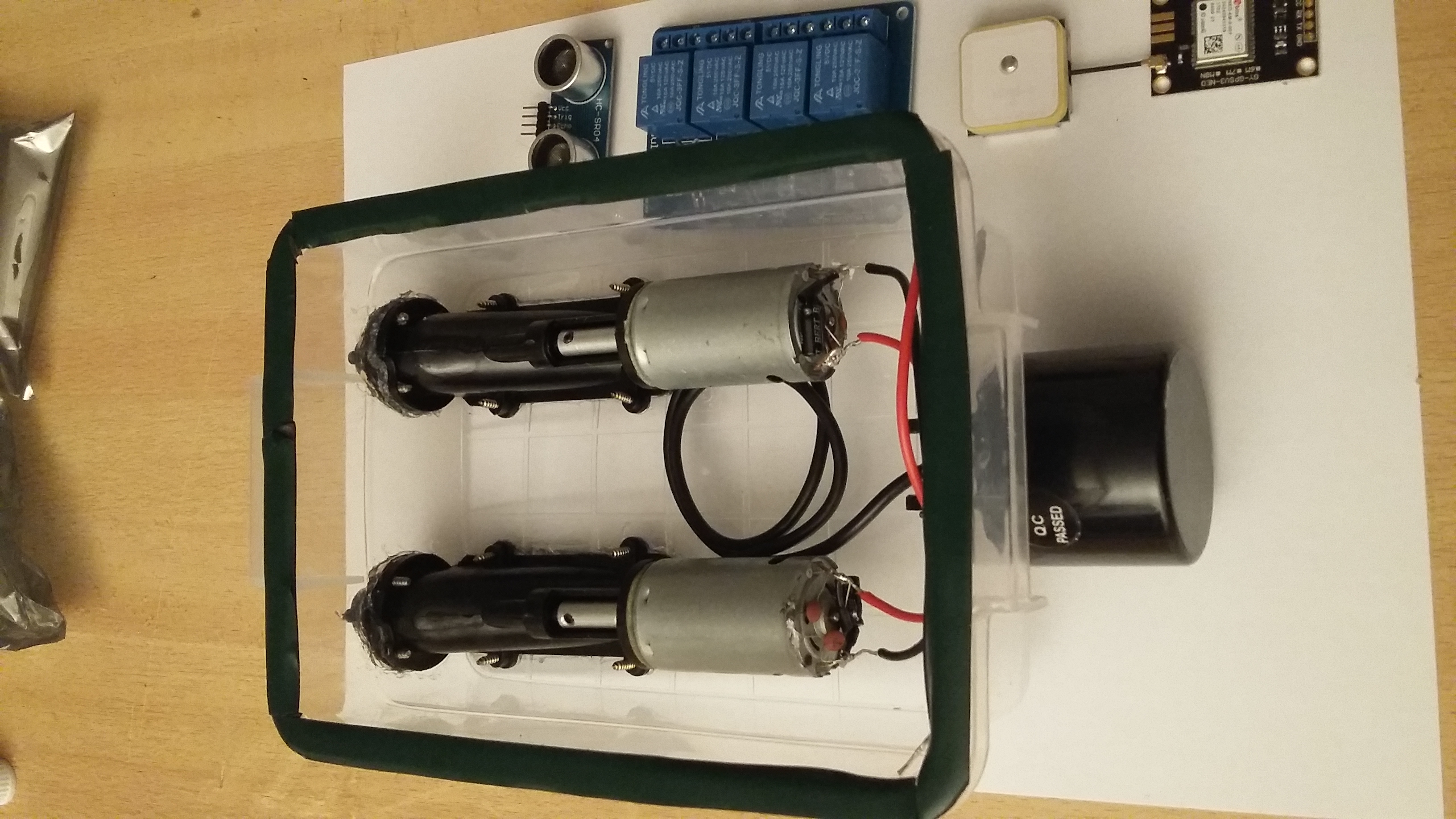
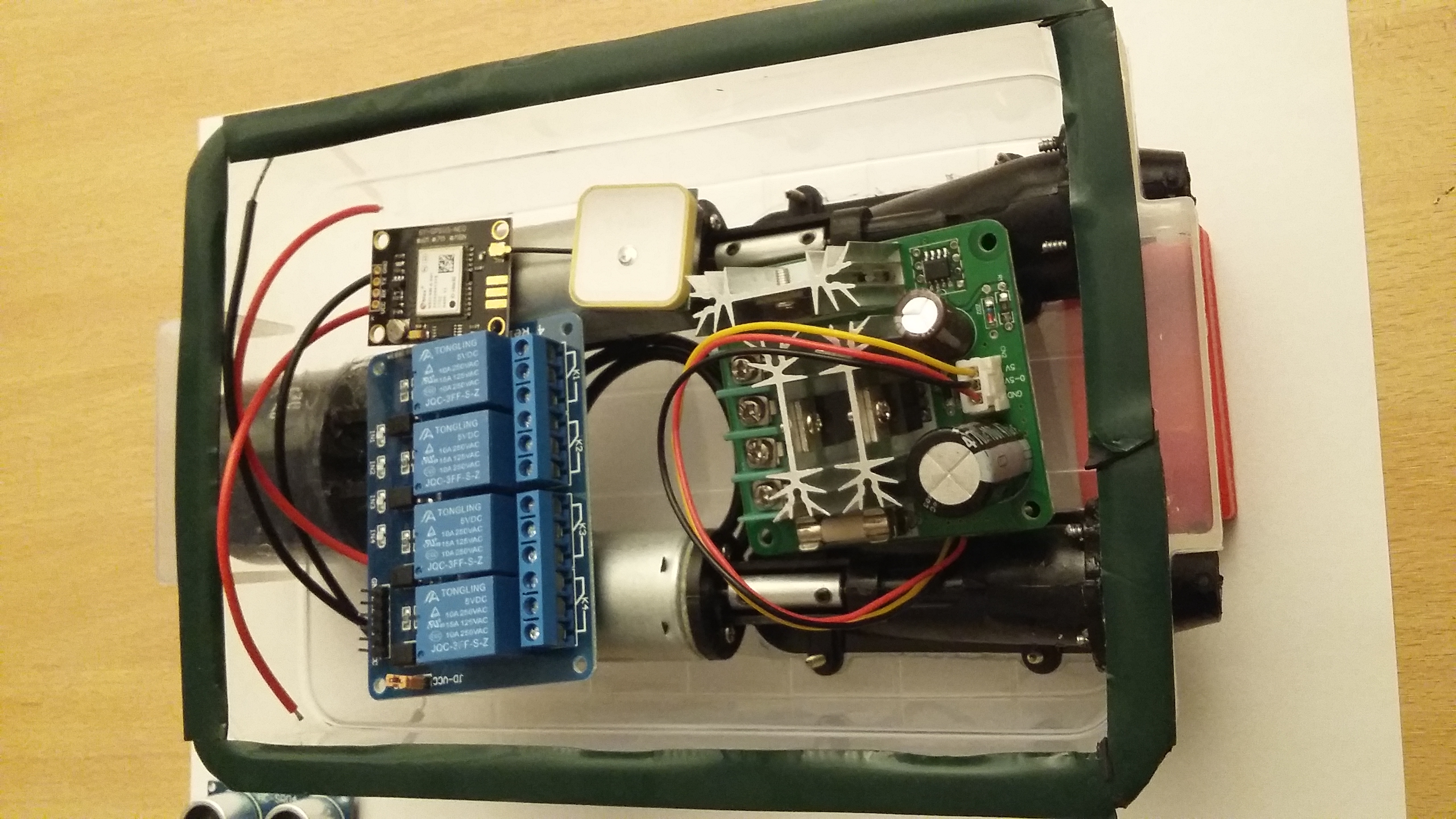
FIG. 1,2 Engineering prototype






|
The current state of development of iLifebuoy is at TRL 4 – proof of concept and a first engineering prototype (with fractional, limited functionality) have been tested. FIG.1, 2 shows the working prototype equipped with 2 “waterjets”, sonar, GPS and Wifi module.
Next steps: 1. Test audio recognition sensor. 2. Broadcast MAYDAY signal to the shipCREW network. 3. Integrate GPS Module 4. Integrate a computer-on-module for video analysis and localisation on the MOB.